For my Mobile Robotics 530 class at University of Michigan (Winter 2023) final project, my team and I developed and evaluated image enhancement techniques to improve visual SLAM performance in low-light environments. Our goal was to reduce tracking error, specifically absolute translational error, when using the ORB-SLAM3 algorithm.
The project built upon work from a previous class team that focused primarily on underwater environments, while our approach targeted dark terrestrial environments. To evaluate our methods, we used the TartanAir dataset, which is known for being particularly challenging for visual SLAM systems.
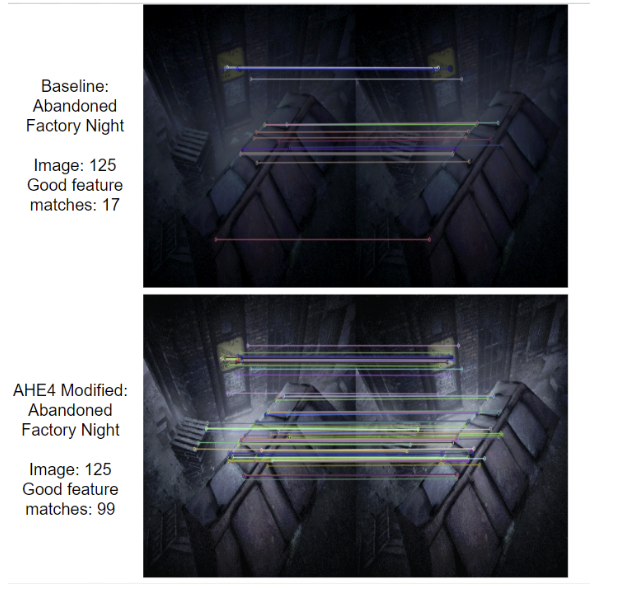
We conducted most of our experiments using the Abandoned Factory Night dataset, a dark outdoor environment that allowed us to develop and test our enhancement techniques. As an additional challenge, we also evaluated performance on the Hospital dataset, a bright indoor environment, to see how our approach handled drastically different lighting conditions.
We compared the performance of our enhancement methods against baseline ORB-SLAM3 as well as the image enhancement approach developed by the previous team.