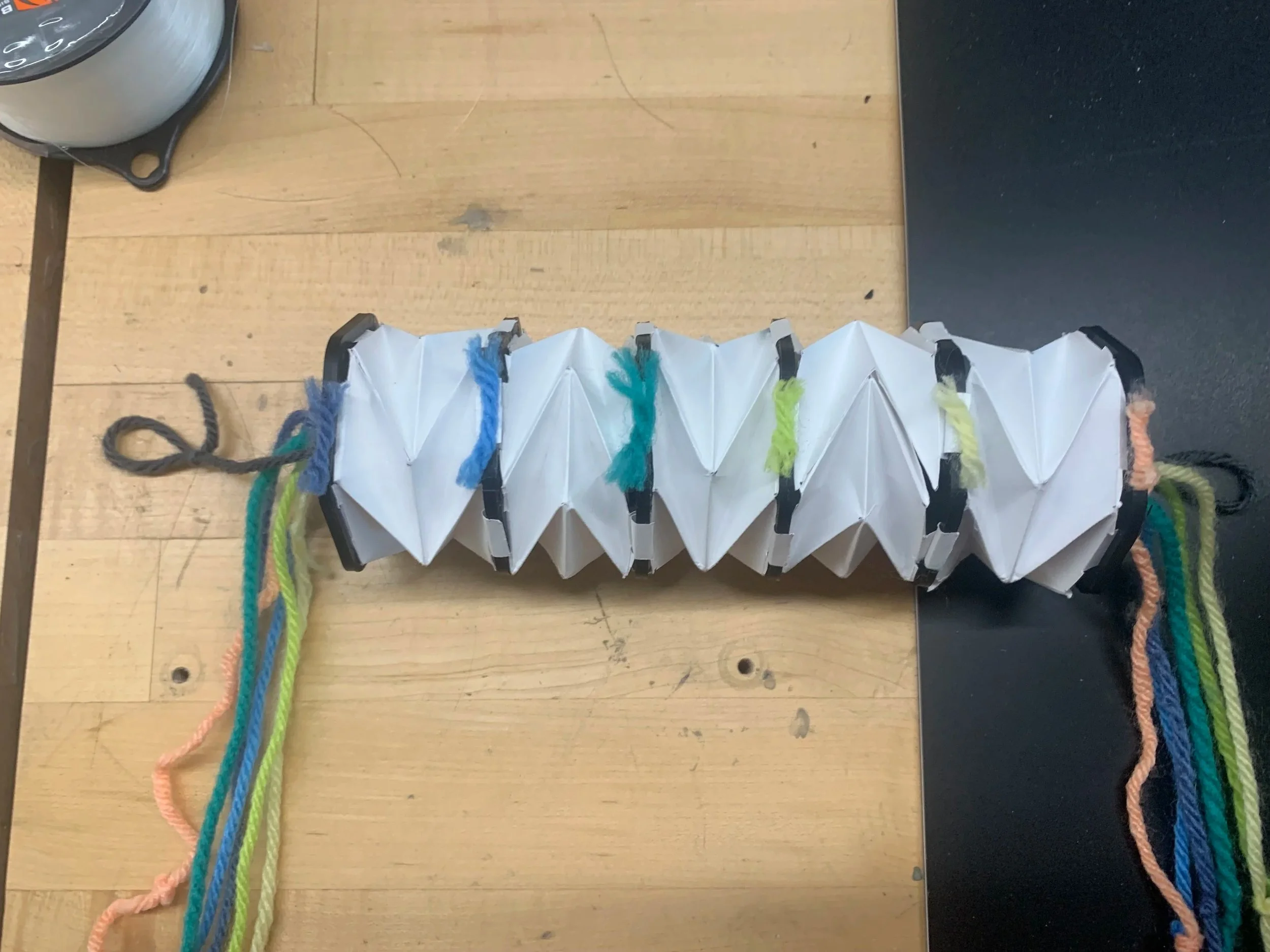
I worked on the Twisted Endoskeletons research project at the University of Michigan, where I designed and built a soft robotic snake platform using knotted sliding strings to control individual spine segments and a double Kresling outer housing. I developed a dynamic systems model alongside the physical prototype to study how independently controlled string-driven segments can coordinate to produce multi-segment motion, with a focus on simulating rectilinear locomotion. One critical feature of this type of design is the potential ability for constructing the system entirely from soft, edible materials to enable safer use in studies of birds that prey on snakes.