In the Umich ROB550 class (Armlab ) at the University of Michigan, teams design a mechanical system to complete a task in the Armlab competition. For my team, I was responsible for designing a mini basketball shooting mechanism using CAD. The mechanism interfaces with the ReactorX 200 robot arm used in Armlab, which pulls a ball carriage to actuate the shooter.
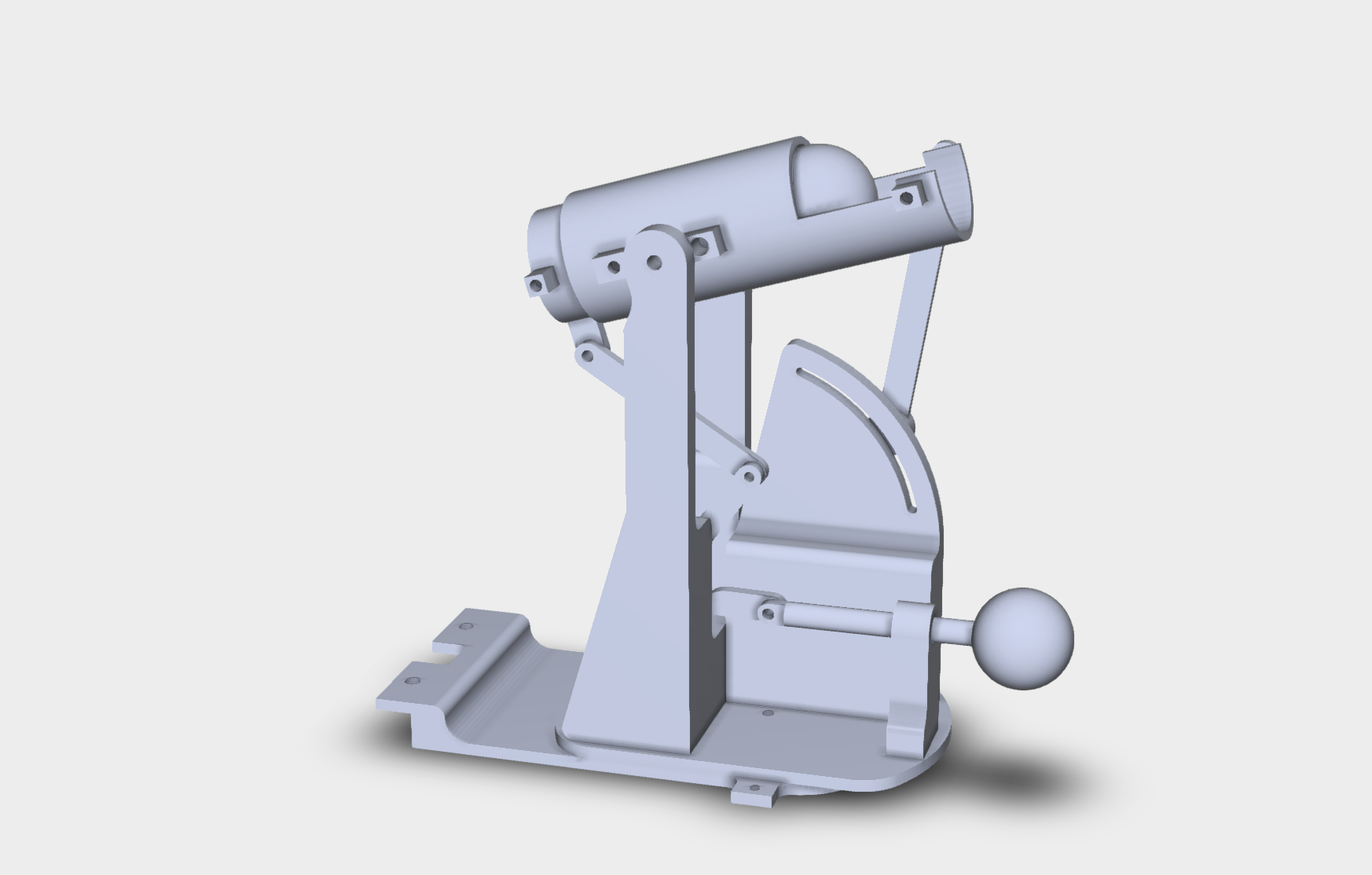
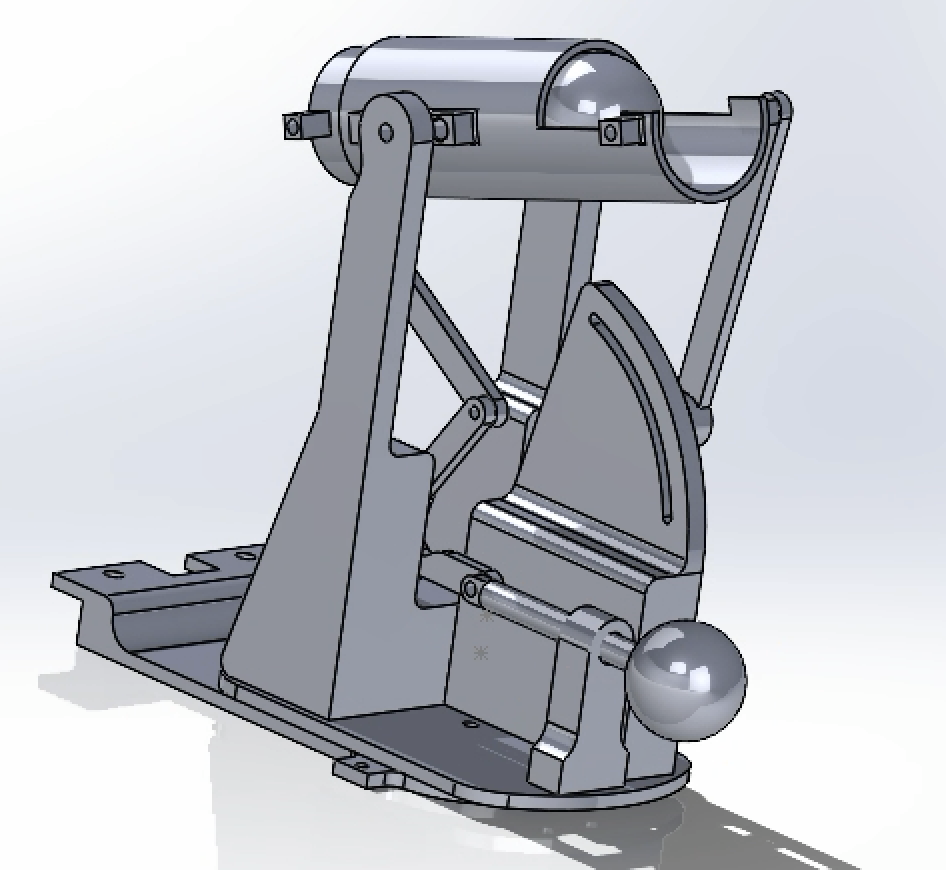
The design uses a four-bar linkage to pull back the launching mechanism, storing energy using either springs or rubber bands to control how far the ball is launched. The system also includes adjustable pitch and yaw for aiming; the yaw can be set by rotating the table carriage and locking it to the base with screws, while the pitch can be adjusted by raising or lowering a side arm either manually or with an optional Dynamixel actuator. The CAD model shows the full mechanism.