Umich MECHENG 646 Final Project:
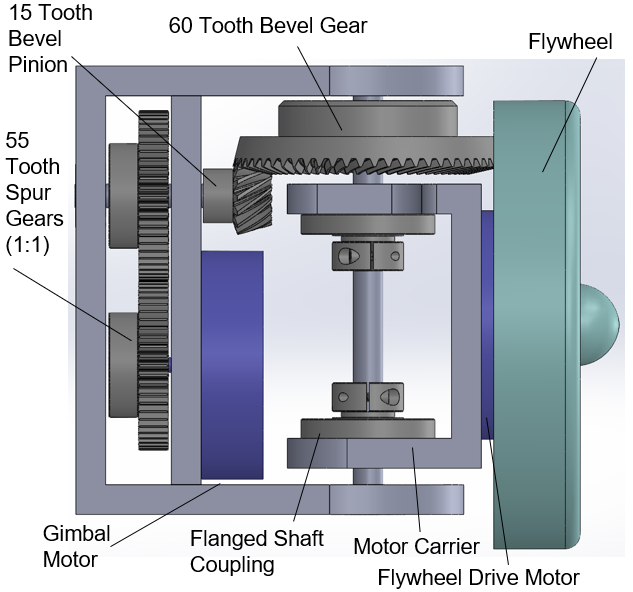
As part of a team-based final project, we developed a wearable fall-assist exoskeleton designed to reduce fall risk in elderly and mobility-impaired individuals who often experience weakened muscles and reduced hip control. The device restores natural hip flexion and extension by applying a rapid corrective hip moment when a fall is detected. Our system uses continuously rotating flywheels that swing about a bevel gear mechanism in the transverse plane, enabling the device to generate forward or backward corrective torque depending on the direction of the fall.
The design targeted a corrective hip moment of approximately 25 N·m delivered within ~140 ms to counteract severe slips or trips. Thermal and electrical testing verified that the motors operated within safe limits without overheating or excessive losses. A compact mechanical design with a 4:1 transmission ratio for the gimbal motors allowed the full system to be packaged into a 7 kg wearable platform while maintaining low reflected inertia. Simulation results showed the system could generate approximately 22 N·m of corrective hip moment within 120 ms, demonstrating strong potential to stabilize users during extreme loss-of-balance events.